

The videoclip below is interesting.
At the 1:57 time stamp, the Finnish Navy is seen launching one of the world’s most advanced autonomous weapons systems in its class. Having been deployed, it slips below the surface where it will lay in wait. Silent. Deadly. Not giving away its presence in any way, but constantly monitoring its surroundings. Waiting. Every movement is registered, and evaluated against the profiles stored in its database. And once there’s a match, it strikes, mercilessly.
I am obviously referring to the Finnish Navy’s PM16 (fi. Pohjamiina for bottom mine, confusingly enough a designation also used for the Finnish Army’s sensor-fused anti-tank mines), the newest addition to the Finnish family of influence mines that started with the PM90, and has since seen the addition of both the PM04 and the PM16 visible above (the PM90 has also been updated to PM90MOD status with an all-new “brain” and sensor-suite). In addition, the Navy has operated British Stonefish (as the PM-85E) and two different kinds of Soviet mines as the PM83-1 and PM83-2 (possibly the MDM-4 and UDM), though these are likely retired by now. Mines are seen as a strategic threshold capability in Finnish doctrine. They can seal off the chokepoints an aggressor needs to enter Finnish territory from the sea, and they will cause significant stress for anyone forced to operate within areas potentially mined. The very shallow nature of both the Gulf of Finland as well as the Archipelago Sea also lend themselves well to both traditional moored mines as well as influence mines. Obviously, history has also shown that in case war would break out, mines can be used to seal of the Gulf of Finland completely. This would make it impossible for vessels to transit between the Russian Baltic Fleet’s main base Baltiysk in Kaliningrad and the Russian mainland, and isolating St Petersburg from the Baltic Sea.
The influence mine is usually not included in discussions regarding autonomous weapons, though there really is no reason why it shouldn’t. After all, it is a system that does all decision making completely on its own once it is released into the wild, with no human in or on the loop. However, the main issue with the mines is that they do not move*, and once a minefield is cleared that area is free to use**. Wouldn’t it be even better if the weapon could move around, suddenly appear in areas previously thought of as safe, or quickly be despatched to areas where control over an area protected by a minefield has been lost?
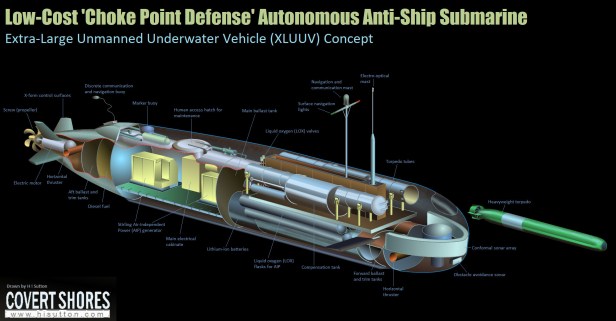
Naval analyst H I Sutton presented an interesting concept on his homepage recently. In short, he asked himself why the concept of operations for the Iranian Ghadir-class of midget submarines – stay hidden close to shipping lanes, wait for surface targets, and then torpedo them – couldn’t conceivably be automated. Wouldn’t an extra-large unmanned underwater vehicle in the class of the US Navy’s Orca-program be a good fit for the mission. Most XLUUVs at the moment are designed for modularity and the possibility of taking up a number of different roles. By focusing on the single relatively straightforward mission of ambushing surface vessels, the complexity and cost becomes lower (to get a feeling for the costs, the current Orca-program has seen Boeing bag a recent order “for the fabrication, test, and delivery of four Orca” worth 43 million USD, following on a roughly equally large contract covering the design phase of the competition).
The XLUUV envisioned by Sutton would sport air-independent propulsion in the form of a stirling engine, and two pre-loaded 533 mm torpedo tubes would provide the sting. An endurance in excess of a week could be achieved, and further cost-savings could be had by restricting the requirements when it comes to performance, including max-depth.
It is easy to see how beneficial a system such as that described by Sutton could be for Finland. A handful of vessels could easily cover the Finnish coastline, and they would be at their strongest outside of the archipelago, a place where the Finnish Navy prefers to spend a relatively limited part of their time. It is also easy to see the value of a remote sensor function where the XLUUVs occasionally send back particularly interesting sensor tracks to the mainland, though this naturally has to be balanced against the value of staying completely silent.
However, it is also easy to see why the Finnish Navy likely won’t pursue this line of development. The Gulf of Finland is shallow enough that more or less any part of it, including the open waters, can likely by mined with bottom mines (and in any case traditional moored mines remain in use as well), and as has been discussed earlier the narrow straight means that any vessel moving in the open waters will be spotted and could be targeted by both artillery and land-based anti-ship missiles. As noted earlier, what the XLUUV option would bring to the Gulf of Finland would not be so much the capability to close of the gulf, that is already possible, but to do so with systems that are extremely difficult to track and take out. The relatively limited firepower of two tubes would also mean that the main threat of any single vessel would be in the psychological realm rather than purely kinetic capability (though considering the limited number of vessels in the Russian Baltic Fleet, XLUUVs that only strike once they match the profile of e.g. LSTs would present a serious headache for the aggressor).

Another question is whether they actually might hold more use in the ASW role, as getting the sensors and weapons for the mission out to open waters without taking undue risks is something of an issue currently. This could also see a step-down to tube-launched 400 mm torpedoes (something the Swedish submarines currently use), making room for a larger number of torpedoes. The choice of only attacking underwater targets would also ensure a significantly smaller risk of collateral damage, something that certainly would aid in public acceptance of the system. Because let’s face it: it might be argued to be intellectually dishonest as I did at the start of this text, but the general public stills sees the sea mine as an explosive round and an autonomous XLUUV as a ‘killer robot’. Any procurement of the latter will first have to overcome this political hurdle.
* There are obviously self-propelled mines, combining the features of the torpedo and sea mine (somewhat ironically, as the term “torpedo” originally referred to mines, with today’s torpedoes being “self-propelled torpedoes”). Saab and Naval Group are both working on development projects aimed at producing modern solutions blurring the torpedo/UUV/mine definitions
** This is only true as long as the area really is clear, something that has proven to be surprisingly difficult to validate. Solutions such as the JDAM-ER with Quickstrike could also quickly change the situation, with e.g. two Super Hornets being able to swiftly put sixteen 450 kg mines on individual pinpoint locations
Sources:
Concept for low-cost autonomous anti-ship submarine
Herätemiinojen kehitystyö Merivoimissa
The Naval Institute Guide to Combat Fleets of the World, 16th Ed.
